
















 224 / 352
224 / 352

220
Figure 6.22: The change after reconstruction
7. DIAGNOSTICS OF DYNAMIC BEHAVIOUR OF DRIVE UNIT
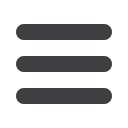
Dynamic behaviour of drive unit B-1800 – Kostolac (Fig. 7.1) was performed in
cooperation with the Faculty of Mining and Geology in Belgrade. Drive unit consists of
three main parts: electromotor, gear box and momentum bar with corresponding supports.
Nominal power of the electromotor, produced by Sever – Subotica, is
P
= 630 kW,
and the angular velocity is
n
= 980 o/min.
Figure 7.1: Drive unit B-1800 –Kostolac
7.1. Modelling and analysis of electromotor behaviour
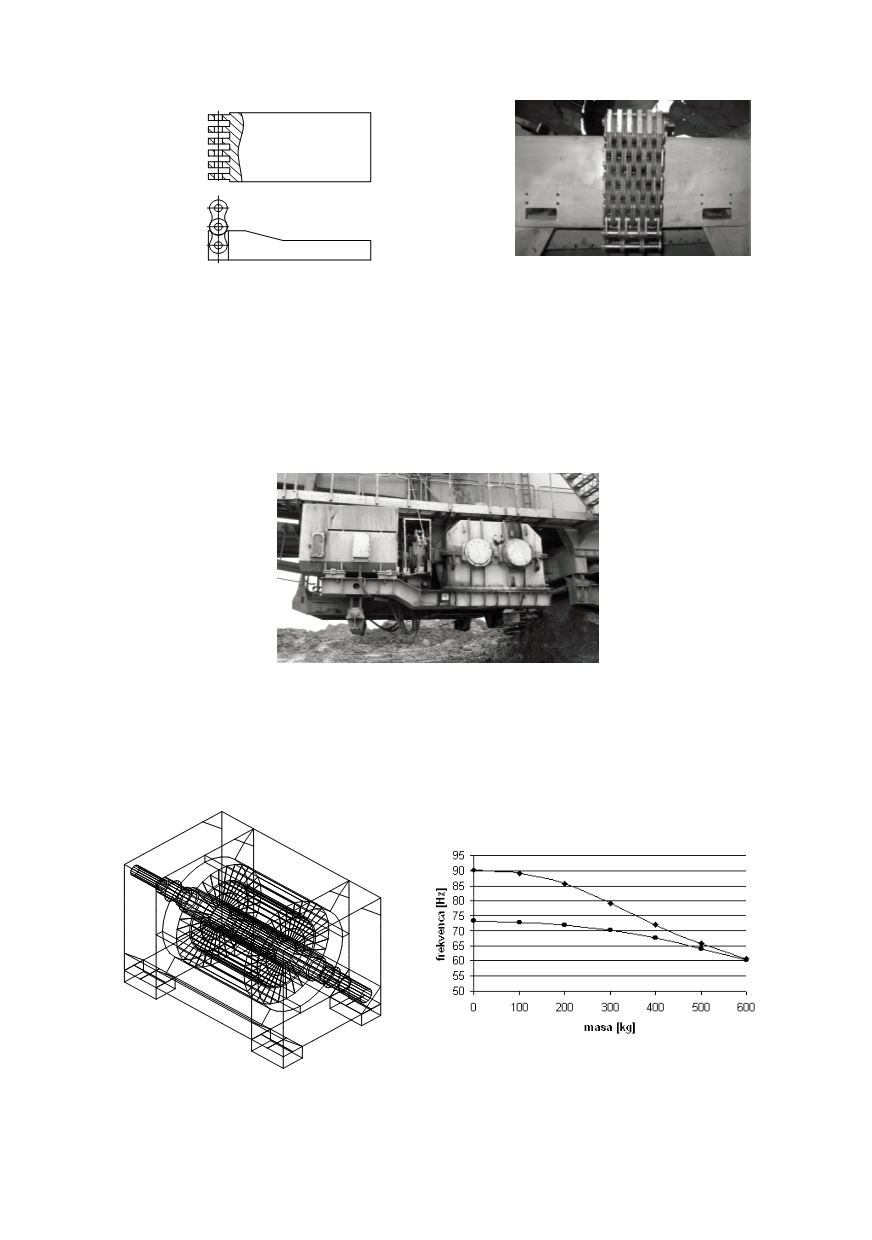
Finite element model of electromotor is shown in Fig. 7.2, and found eigen
frequencies are presented in Fig. 7.3. The influence of the coupling masses on the eigen-
frequencies of electromotor, listed in Table 7.1, are used to draw diagram in. Fig. 7.3.
Figure 7.2: Model of electromotor
Figure 7.3: Eigen frequencies of electromotor as a
function of coupling mass